本周主要围绕 Linux 开发环境配置、远程代码管理以及 ROS 基础操作展开,完成了以下几项内容:
一、GitHub SSH 密钥配置与 Ubuntu 命令行交互 本周在 Ubuntu 环境中完成了 GitHub SSH 密钥的生成与配置。通过使用 ssh-keygen 命令生成公钥与私钥,并将公钥添加到 GitHub 账户中,实现了本地与远程仓库的免密码连接。同时,熟悉了常用的 Git 命令(如 clone、pull、push 等),能够在 Ubuntu 终端中完成基本的代码版本管理操作,提高了开发效率。
二、VS Code 与 WSL Ubuntu 环境集成 完成了 Visual Studio Code 与 Windows Subsystem for Linux(WSL)的集成配置。通过安装 Remote - WSL 插件,实现了在 Windows 环境下直接连接并操作 Ubuntu 子系统。能够在 VS Code 中打开 WSL 目录、编辑代码并调用 Linux 终端运行程序,提升了跨平台开发的便捷性和一致性。
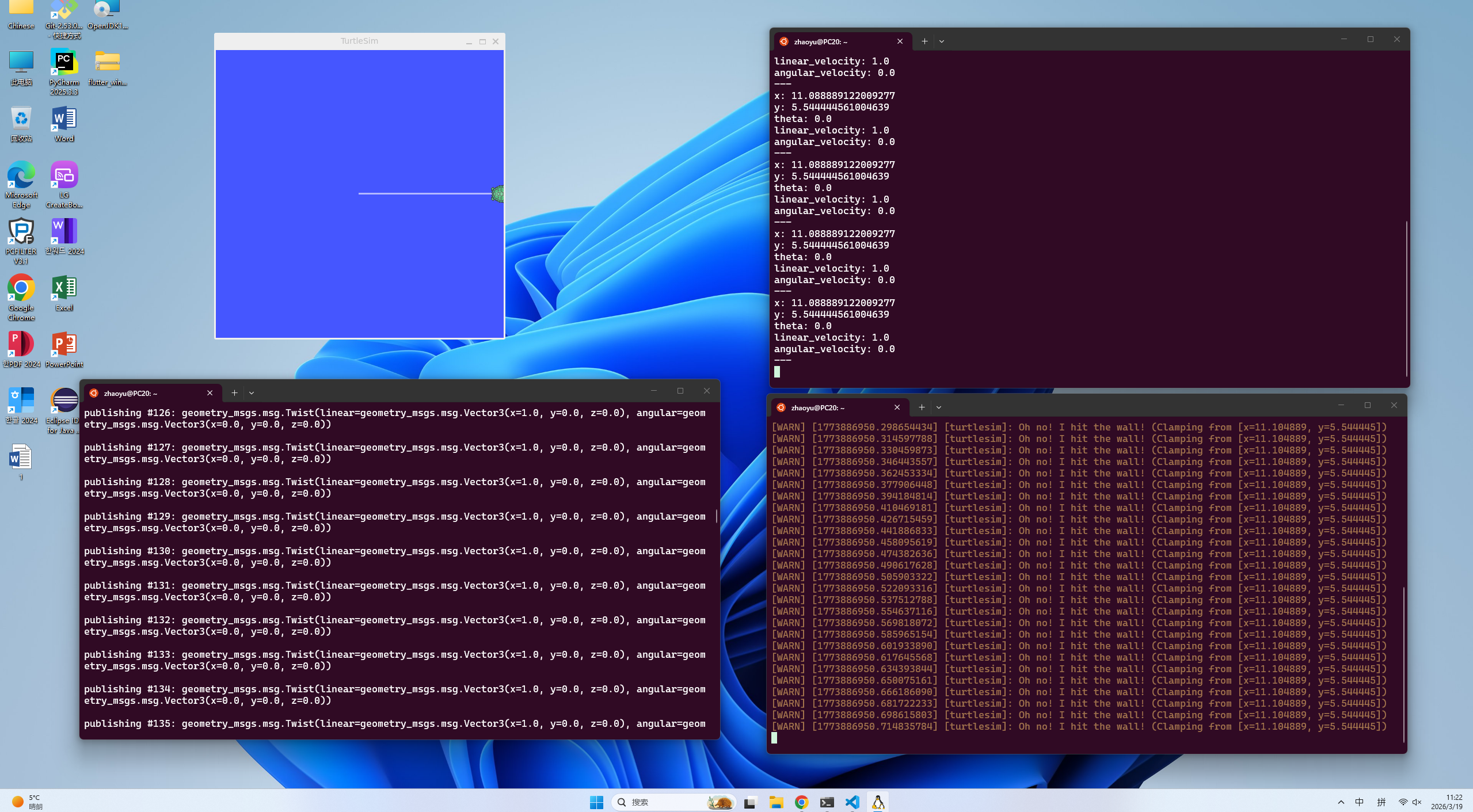
三、ROS 小乌龟节点运行与命令行交互 在 Ubuntu 环境中完成了 ROS 基础实验,成功运行“小乌龟”仿真程序(turtlesim)。通过启动 ROS Master,并运行 turtlesim 节点,实现了图形界面的显示。同时,使用键盘控制节点对小乌龟进行运动控制,掌握了基本的 ROS 命令行操作,包括节点启动、话题通信以及简单的交互控制,对 ROS 的通信机制有了初步认识。
总体来看,本周重点掌握了 Linux 环境下的开发基础工具(Git、VS Code、WSL)以及 ROS 的入门操作流程,为后续机器人系统开发打下了良好的基础。