一、编程基础概念学习 下周将系统学习编程的基础概念,包括变量、数据类型、运算符、条件语句、循环结构以及函数等内容。通过在 Python 环境中进行简单练习,加深对程序执行流程的理解,逐步建立基本的编程思维。同时,掌握基础的调试方法,能够识别并解决常见的语法错误和运行错误。
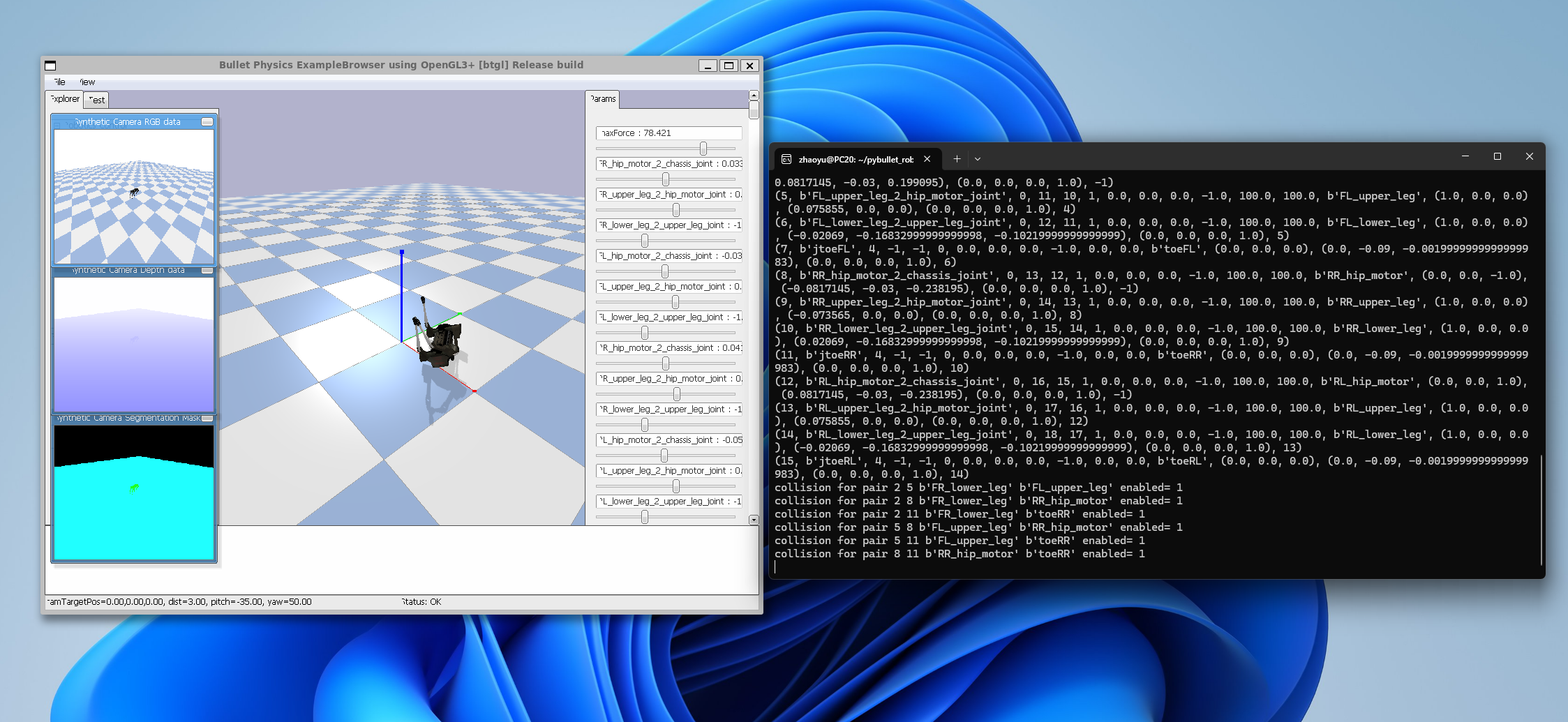
二、机器人基础概念说明 在机器人相关理论方面,将学习机器人的基本组成与工作原理,包括传感器、执行器、控制系统等核心模块。了解机器人系统中的信息流与控制流程,并初步接触机器人操作系统的基本概念,为后续深入学习 Robot Operating System 打下理论基础。
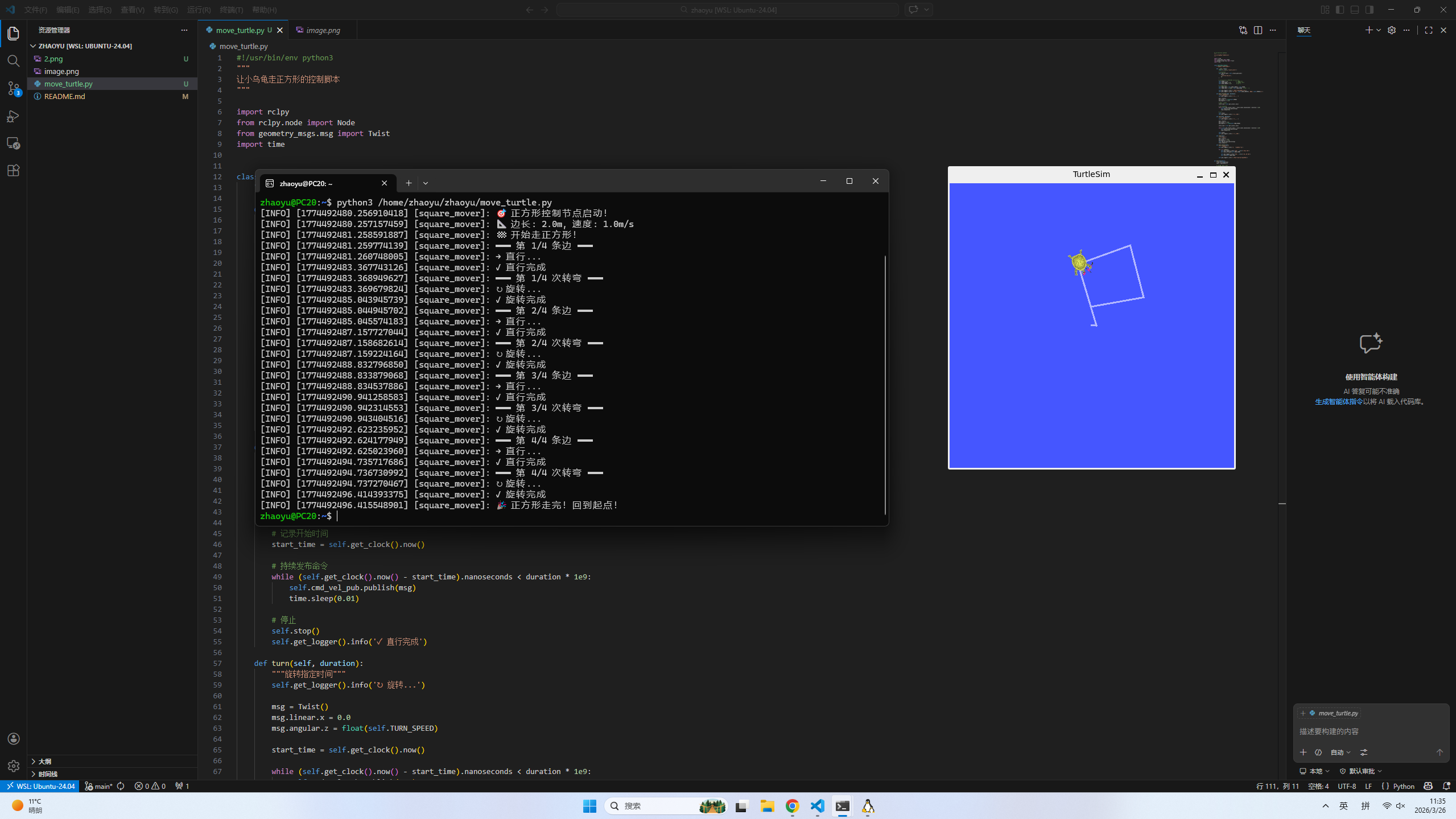
三、程序运行与实践作业 结合所学编程知识,在 Ubuntu 环境中完成程序的编写与运行练习。通过在 Visual Studio Code 或终端中运行 Python 程序,熟悉从编写、调试到执行的完整流程。同时,根据课程要求完成指定作业任务,确保能够独立运行程序并理解其输出结果。
总体而言,下周的重点在于打牢编程基础,并将理论知识与实际操作相结合,为后续机器人编程与系统开发做好准备。
 ```#!/usr/bin/env python3
“””
让小乌龟走正方形的控制脚本
“””
```#!/usr/bin/env python3
“””
让小乌龟走正方形的控制脚本
“””
import rclpy from rclpy.node import Node from geometry_msgs.msg import Twist import time
class SquareMover(Node): “"”走正方形的控制节点”””
def __init__(self):
super().__init__('square_mover')
# 创建发布者
self.cmd_vel_pub = self.create_publisher(
Twist,
'/turtle1/cmd_vel',
10
)
# ============ 参数设置 ============
self.SPEED = 1.0 # 线速度 m/s
self.TURN_SPEED = 1.0 # 角速度 rad/s
self.SIDE_LENGTH = 2.0 # 边长 m
# 计算运动时间
self.MOVE_TIME = self.SIDE_LENGTH / self.SPEED
self.TURN_TIME = 1.5708 / self.TURN_SPEED # 90° = π/2
self.get_logger().info('🎯 正方形控制节点启动!')
self.get_logger().info(f'📐 边长: {self.SIDE_LENGTH}m, 速度: {self.SPEED}m/s')
def move_straight(self, duration):
"""直行指定时间"""
self.get_logger().info('→ 直行...')
msg = Twist()
msg.linear.x = float(self.SPEED)
msg.angular.z = 0.0
# 记录开始时间
start_time = self.get_clock().now()
# 持续发布命令
while (self.get_clock().now() - start_time).nanoseconds < duration * 1e9:
self.cmd_vel_pub.publish(msg)
time.sleep(0.01)
# 停止
self.stop()
self.get_logger().info('✓ 直行完成')
def turn(self, duration):
"""旋转指定时间"""
self.get_logger().info('↻ 旋转...')
msg = Twist()
msg.linear.x = 0.0
msg.angular.z = float(self.TURN_SPEED)
start_time = self.get_clock().now()
while (self.get_clock().now() - start_time).nanoseconds < duration * 1e9:
self.cmd_vel_pub.publish(msg)
time.sleep(0.01)
self.stop()
self.get_logger().info('✓ 旋转完成')
def stop(self):
"""停止运动"""
msg = Twist()
msg.linear.x = 0.0
msg.angular.z = 0.0
self.cmd_vel_pub.publish(msg)
time.sleep(0.1)
def move_square(self):
"""执行走正方形"""
self.get_logger().info('🏁 开始走正方形!')
for i in range(4):
self.get_logger().info(f'━━━ 第 {i+1}/4 条边 ━━━')
self.move_straight(self.MOVE_TIME)
self.get_logger().info(f'━━━ 第 {i+1}/4 次转弯 ━━━')
self.turn(self.TURN_TIME)
self.get_logger().info('🎉 正方形走完!回到起点!')
def main(args=None): rclpy.init(args=args) node = SquareMover()
# 给系统一点准备时间
time.sleep(1)
# 执行走正方形
node.move_square()
node.destroy_node()
rclpy.shutdown()
if name == ‘main’: main()