本周的学习内容主要围绕知识复习、传感器基础以及 ROS2 实验展开,同时结合课后作业进行巩固,具体如下:
一、课程内容复习 本周首先对前几周所学习的内容进行了系统复习,包括 Linux 基本操作、编程基础知识以及机器人运动学相关概念。通过回顾关键知识点,加深对系统环境配置、程序运行流程以及基本理论的理解,为后续实验内容打下扎实基础。
二、传感器基础介绍 学习了机器人中常见传感器的基本类型与工作原理,包括距离传感器、视觉传感器、惯性测量单元(IMU)等。了解不同传感器在机器人系统中的作用,以及它们如何采集环境信息并为控制系统提供数据支持。同时,对传感器数据的基本特性(如噪声、精度、频率等)有了初步认识。
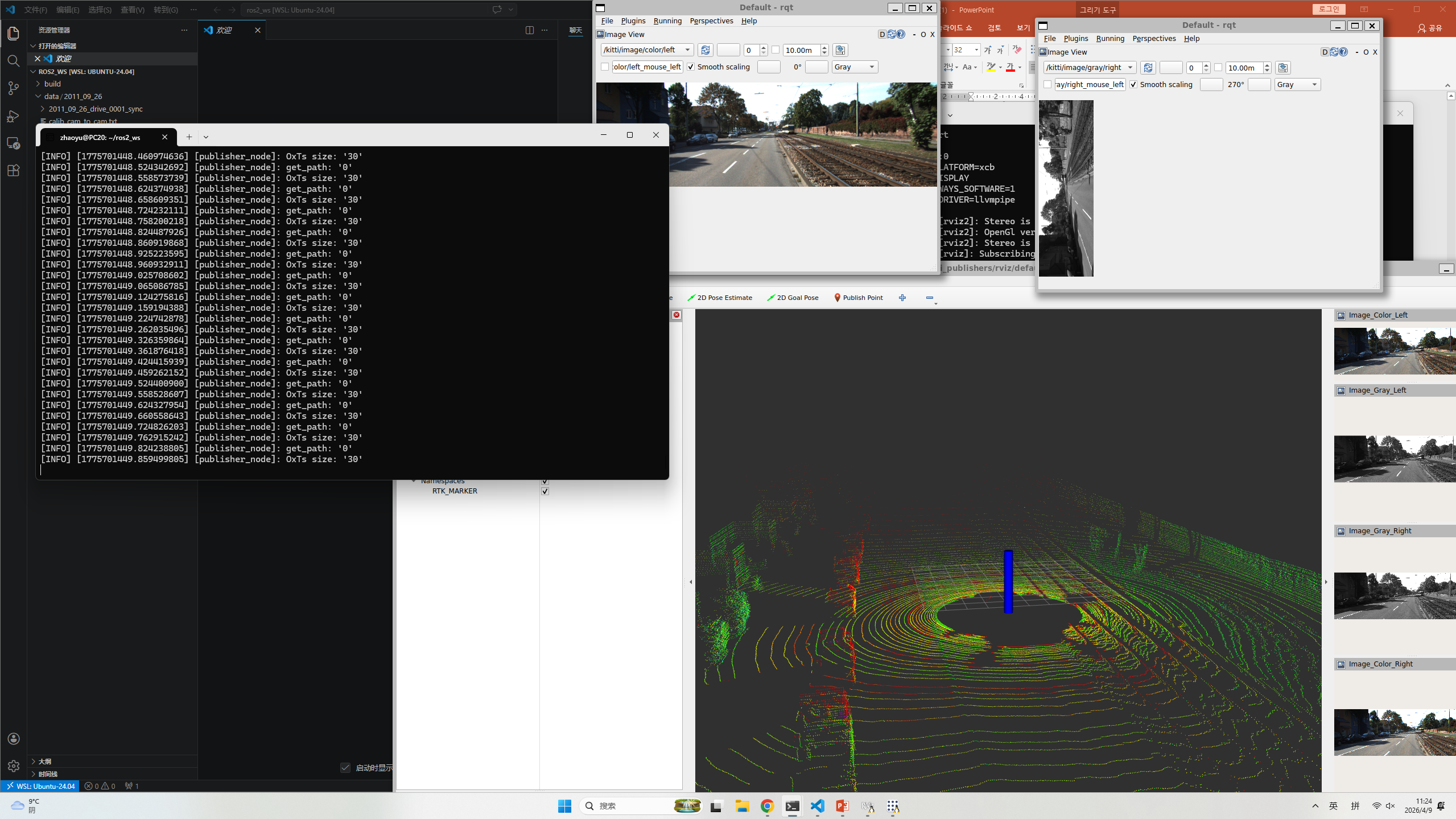
三、传感器 ROS2 实验 在 Robot Operating System 2 环境下完成传感器相关实验。通过运行节点、查看话题数据以及使用命令行工具(如 topic list、topic echo 等),观察传感器数据的发布与订阅过程,理解 ROS2 中节点通信机制。通过实际操作,加深了对机器人系统中信息交互流程的理解。
四、课后作业完成 根据课程要求完成相关作业内容,包括基础程序编写与实验结果分析。在 Ubuntu 环境中进行代码运行与调试,进一步熟悉开发流程。同时,对实验过程中遇到的问题进行总结,提高问题分析与解决能力。
总体来看,本周通过“复习 + 理论 + 实验 + 作业”的方式,进一步巩固了机器人系统相关知识,并提升了在 ROS2 环境下进行实际操作的能力。